제어기기에서 보상이 필요한 이유는 다음과 같습니다:
- 제어 시스템은 원하는 출력을 얻기 위해 입력을 조정합니다. 그러나 실제 시스템은 이상적인 모델과는 다르게 여러 가지 불완전한 특성을 가지고 있습니다. 예를 들어, 시스템의 동적 특성, 노이즈, 외부의 간섭 등으로 인해 원하는 출력을 얻지 못할 수 있습니다1.
- 이러한 문제를 해결하기 위해 보상기가 사용됩니다. 보상기는 시스템의 불완전한 특성을 보완하고, 성능을 개선하며, 안정성을 확보하는 역할을 합니다1.
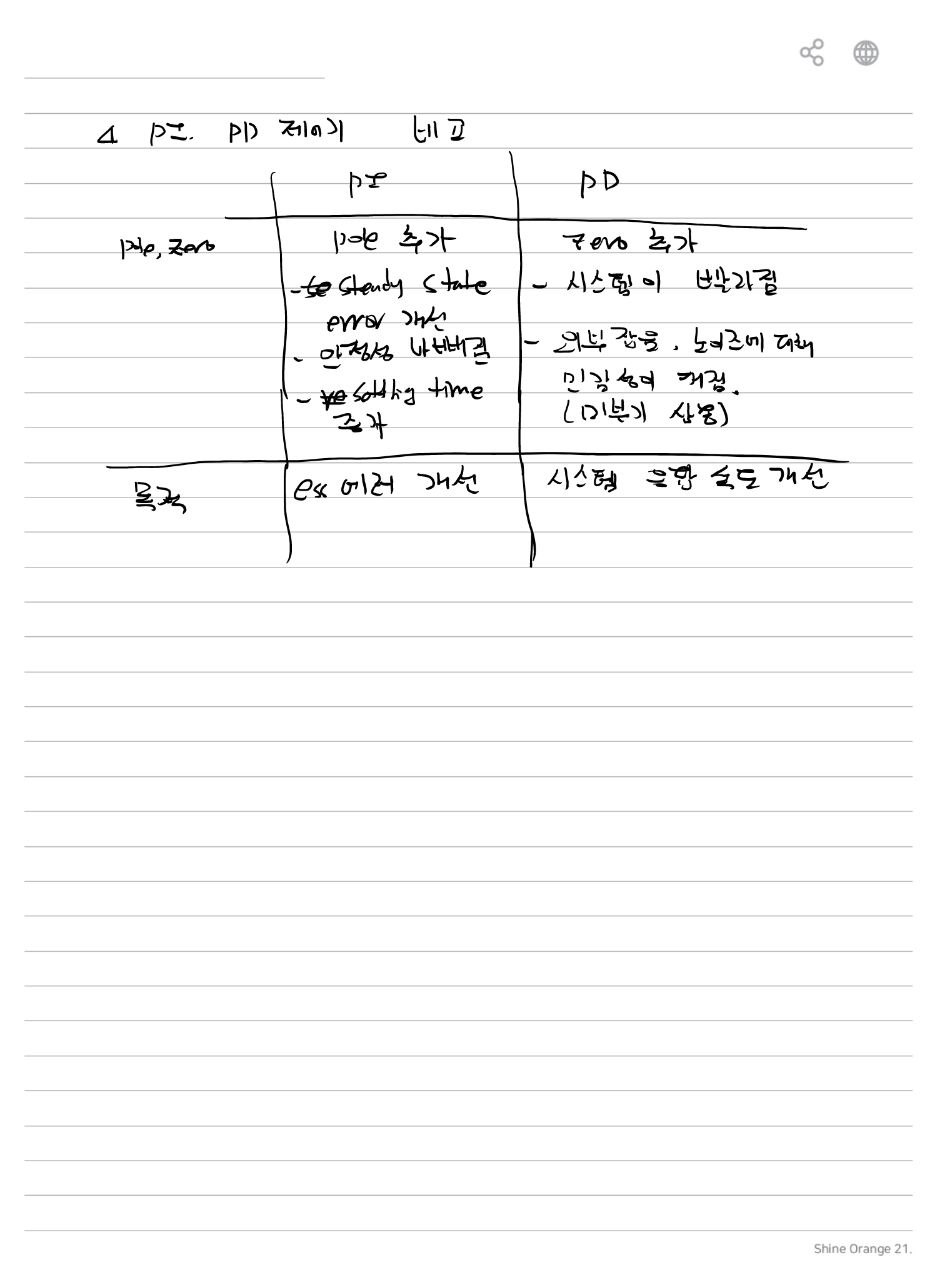
PI 보상기와 PD 보상기의 특징은 다음과 같습니다:
- PI 보상기 : PI 보상기는 Proportional (비례) 제어와 Integral (적분) 제어를 결합한 것입니다2. 이는 오차의 적분 값을 제어 신호로 사용하여 정상 상태에서의 추적 오차를 거의 0으로 만들 수 있습니다2. 하지만 과도 응답 속도가 느려지고 심한 경우에는 과도 응답이 불안정해지는 경우가 종종 생기므로, PI 보상기를 설계할 때에는 이러한 문제점에 유의해야 합니다3.
- PD 보상기 : PD 보상기는 Proportional (비례) 제어와 Derivative (미분) 제어를 결합한 것입니다4. PD 보상기는 시스템의 과도응답을 개선하고 응답속도를 빠르게 해주는 효과를 나타냅니다5. 하지만 대역폭이 넓어질수록 출력에 나타나는 잡음의 영향이 커질 수 있다는 것에도 유의해야 합니다4.