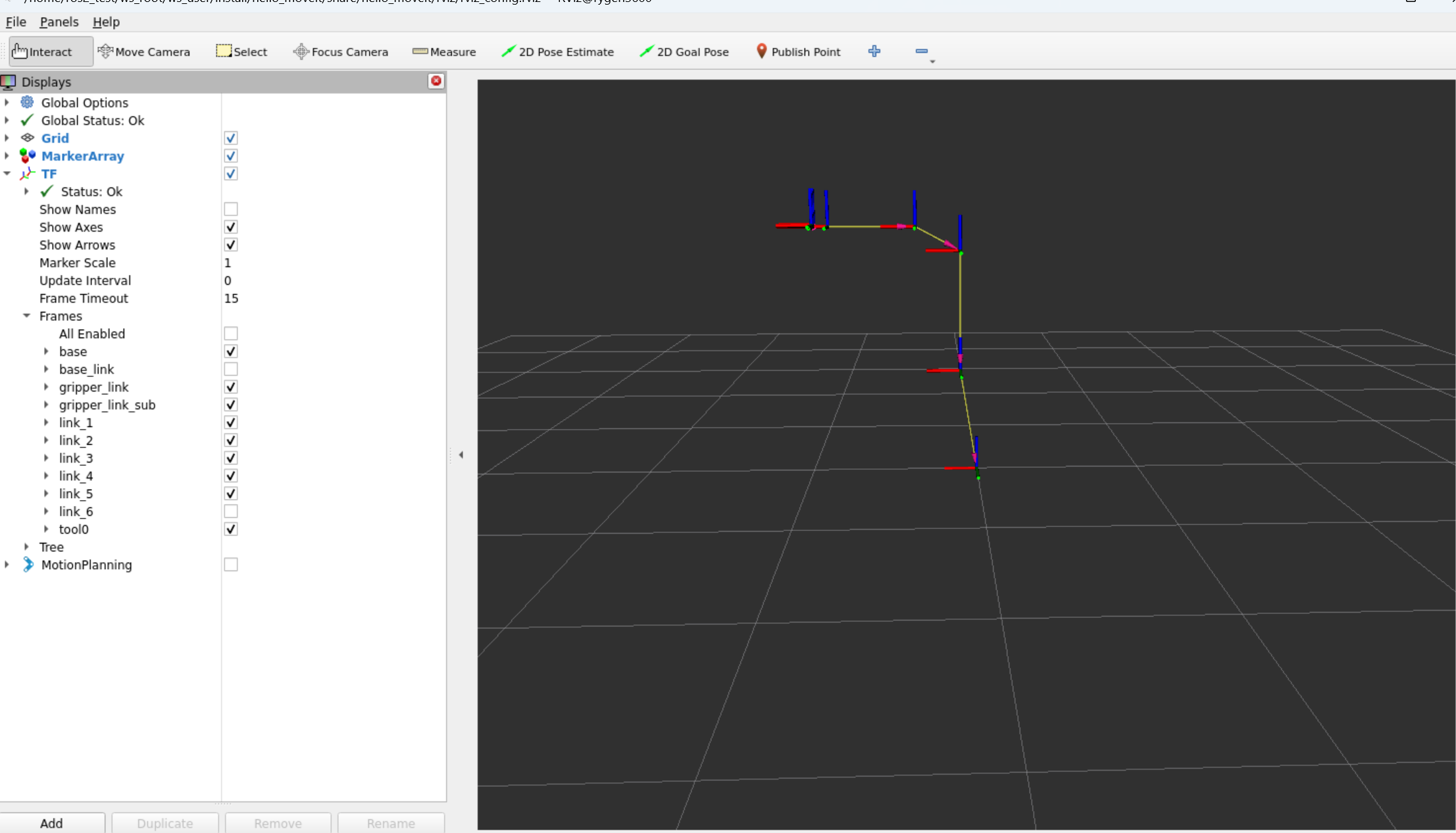
ROSros2 moveit TF 표시 이대원 / 2023-08-11 moveit_setup_assistant를 사용하면 대상이 되는 package에서 urdf를 추출한 다음, 필요한 설정 파일을 만든 후 package+moveit_config 디렉토리에 생성한 파일을 저장한다. lanch 디렉토리에