open62541 method call
튜토리얼에 method call이 있어 따라 해봤다. method를 서버에 설정하고, client에서 반응을 보고 싶었는데, 잘 안됬다. 두 시간 삽질만에 UA_VARINT에서 UA_String을 […]
튜토리얼에 method call이 있어 따라 해봤다. method를 서버에 설정하고, client에서 반응을 보고 싶었는데, 잘 안됬다. 두 시간 삽질만에 UA_VARINT에서 UA_String을 […]
tutorial을 열심히 따라했지만 변수를 추가하다 막혀 못했다. 내가 OPC-UA 프로토콜을 제대로 이해하지 못한 탓이다. 아래를 참조하여 변수를 서버에 간단히 추가했다.
하. 드디어 여기까지 왔다. opc ua를 설치하면 자동화 기기에서 정보를 쉽게 읽을 수 있다. 여기에서 여러 오픈소스 프로그램을 찾았다. 소개한
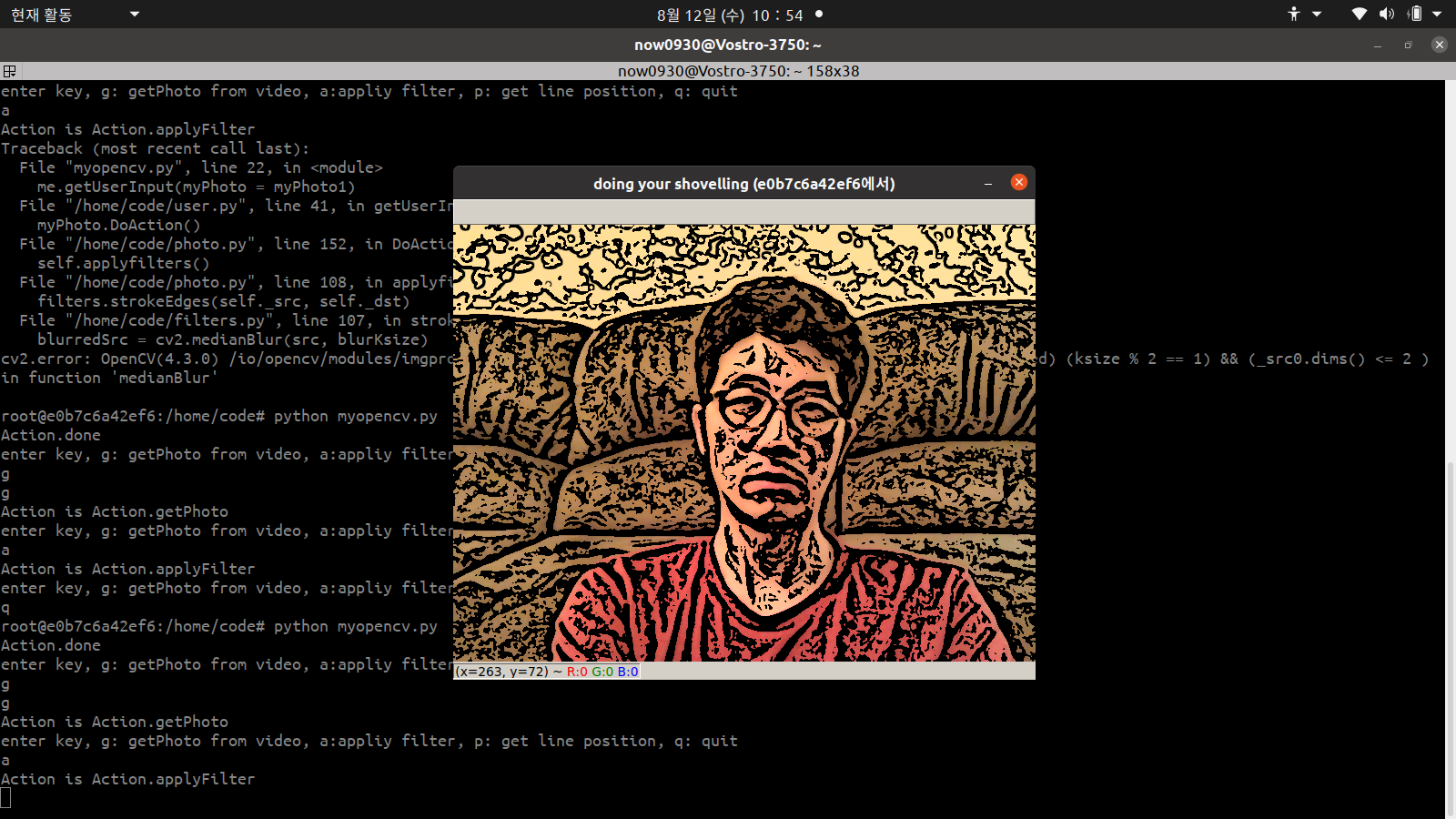
삽질로 video로 들어오는 입력을 필터링 했다. cv2.waitKey(delay)가 없으면 프레임을 업데이트 하지 않는다. windowmanager에서 callback 함수를 만들어, 웹캠 캡쳐 -> 파일로
isbn: 978-1789531619 opencv를 배우려 인터넷을 헤메기 전 적당한 책을 보기로 했다. 역시 찾아보면 인터넷에 있다. 책에 실린 예제를 실행했다. 객체지향