물리 엔진을 가지고 있는 gazebo로 로봇을 만들지 않고도 쉽게 테스트 해 볼 수 있다. 기본 설정 파일이 있는데, 사용자가 취향에 맞춰 자유롭게 환경 설정을 할 수도 있다. 빈 공간에 각종 모듈을 불러 내 공간에 넣고, gazebo tutorial을 따르면 로봇도 spawn 가능하다.
Programming Robots With Ros 책 144p에 보면 간단한 python 파일을 만들고 gazebo에 로딩하는 내용이 있다.
http://wiki.ros.org/simulator_gazebo/Tutorials/SpawningObjectInSimulation
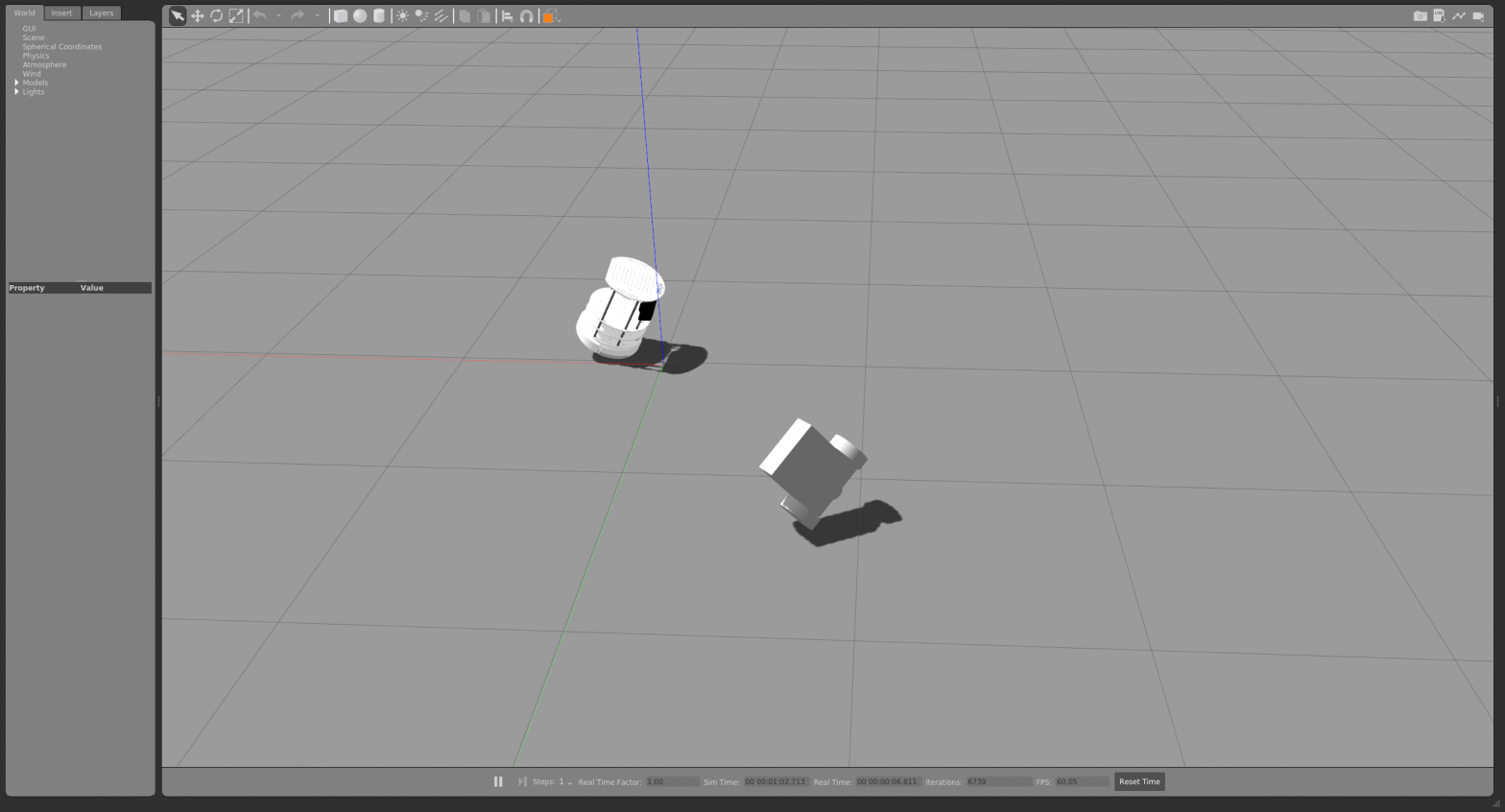
사용자가 만든 urdf 파일을 gazebo 가상 환경에 spawn 할 수 있다. 다만 inetia를 모두 입력해야(틀린 값이라도 입력해야) gazebo가 인식한다. spawn_model가 gazebo_ros 패키지에 포함되어 있다. inetia 값을 입력하지 않으면 로딩이 안된다. 중간에 나오는 spawn service failed는 무시해도 괜찮은 듯 하다. 어쨋든 굴러 가니까.
[INFO] [1662392890.824294, 55.975000]: Spawn status: SpawnModel: Entity pushed to spawn queue, but spawn service timed out waiting for entity to appear in simulation under the name agv_number1 [ERROR] [1662392890.827400, 55.975000]: Spawn service failed. Exiting.
launch 파일이다.
<?xml version="1.0" encoding="UTF-8"?> <launch> <!-- Robot pose --> <arg name="x" default="0"/> <arg name="y" default="0"/> <arg name="z" default="1"/> <arg name="roll" default="3.14"/> <arg name="pitch" default="2"/> <arg name="yaw" default="0"/> <arg name="model_name" default="agv_number1"/> <!--<param name="robot_description" command = "cat $(find wander_bot)/urdf/robot.urdf"/>--> <!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched --> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find wander_bot)/worlds/my_world"/> <arg name="use_sim_time" value="true"/> <!-- more default parameters can be changed here --> </include> <param name="robot_description" textfile = "$(find wander_bot)/urdf/robot.urdf" /> <!-- Spawn My Robot --> <!-- <node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -param robot_description -model $(arg model_name) -x $(arg x) -y $(arg y) -z $(arg z) -R $(arg roll) -P $(arg pitch) -Y $(arg yaw)"/> --> <node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -param robot_description -model $(arg model_name) -x $(arg x) -y $(arg y) -z $(arg z) -R $(arg roll) -P $(arg pitch) -Y $(arg yaw)"/> <node name="test_node" pkg="wander_bot" type="red_green_light.py" args="/cmd_vel"> </node> </launch>
urdf 파일이다.
<?xml version="1.0" ?> <robot name="mobile_robot" xmlns:xacro="http://www.ros.org/wiki/xacro"> <material name="blue"> <color rgba = "0 0 0.8 1"/> </material> <material name="gray"> <color rgba = "1 1 1 1"/> </material> <material name="blueviolet"> <color rgba = "0.54 0.16 0.88 1"/> </material> <link name = "base_footprint"/> <link name="base_link"> <visual> <origin xyz="0 0 0" rpy = "0 0 0"/> <geometry> <box size = "0.3 0.24 0.1" rpy = "0 0 0" /> </geometry> <material name = "gray"/> </visual> <collision> <origin xyz="0 0 0.03" rpy = "0 0 0"/> <geometry> <box size = "0.3 0.25 0.1" /> </geometry> </collision> <inertial> <mass value = "1.0" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name = "base_footprint_fixed" type = "fixed"> <origin xyz = "0 0 0.03" rpy = "0 0 0"/> <parent link = "base_footprint"/> <child link = "base_link"/> </joint> <link name = "left_wheel"> <visual> <origin xyz = "0 0 0" rpy = "1.570796 0 0" /> <geometry> <cylinder length = "0.05" radius = "0.08" /> </geometry> <material name ="blue"/> </visual> <collision> <origin xyz = "0 0 0" rpy = "1.570796 0 0" /> <geometry> <cylinder length = "0.05" radius = "0.08" /> </geometry> </collision> <inertial> <mass value = "1.0" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" /> </inertial> </link> <link name = "right_wheel"> <visual> <origin xyz = "0 0 0" rpy = "1.570796 0 0" /> <geometry> <cylinder length = "0.05" radius = "0.08" /> </geometry> <material name ="blue"/> </visual> <collision> <origin xyz = "0 0 0" rpy = "1.570796 0 0" /> <geometry> <cylinder length = "0.05" radius = "0.08" /> </geometry> </collision> <inertial> <mass value = "1.0" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name = "left_wheel_joint" type = "continuous"> <origin xyz = "0.1 0.15 0" rpy = "0 0 0"/> <parent link = "base_link"/> <child link = "left_wheel"/> <axis xyz = "0 1 0"/> </joint> <joint name = "right_wheel_joint" type = "continuous"> <origin xyz = "0.1 -0.15 0" rpy = "0 0 0"/> <parent link = "base_link"/> <child link = "right_wheel"/> <axis xyz = "0 1 0" /> </joint> <link name="scanner_link"> <visual> <origin xyz="0 0 0" rpy = "0 0 0"/> <geometry> <cylinder length="0.05" radius="0.035"/> </geometry> <material name = "blueviolet"/> </visual> <collision> <origin xyz="0 0 0" rpy = "0 0 0"/> <geometry> <cylinder length="0.05" radius="0.035"/> </geometry> </collision> <inertial> <mass value = "1.0" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="100.0" iyz="0.0" izz="1.0" /> </inertial> </link> <joint name = "head_scanner" type = "fixed"> <origin xyz = "0.15 0 0" rpy = "0 1.5708 0"/> <parent link = "base_link"/> <child link = "scanner_link"/> </joint> </robot>
직접 해보기도 좋지만, 남이 한 프로젝트를 보는게 더 빠르다.