생활코딩
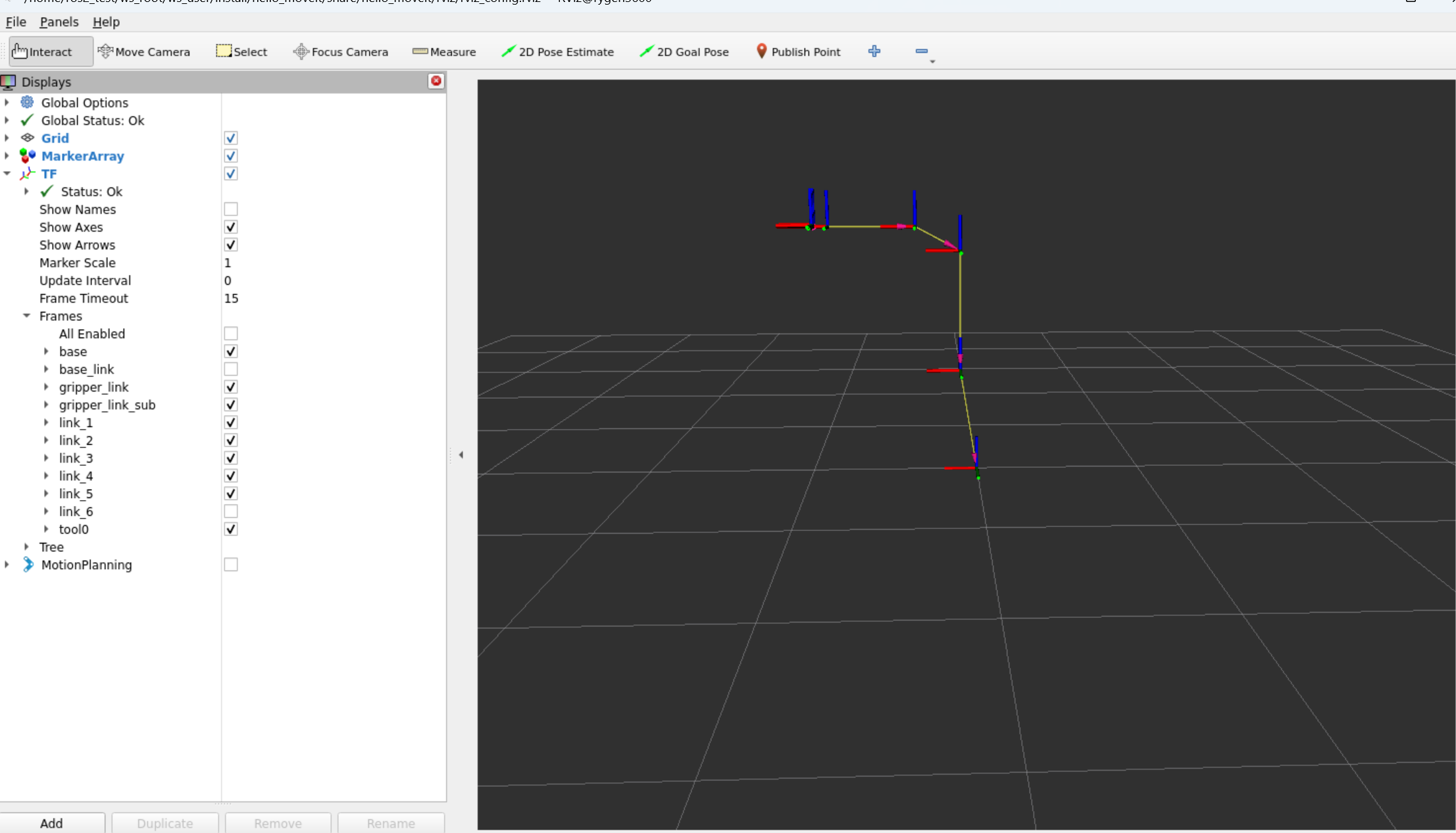
ros2 moveit TF 표시
moveit_setup_assistant를 사용하면 대상이 되는 package에서 urdf를 추출한 다음, 필요한 설정 파일을 만든 후 package+moveit_config 디렉토리에 생성한 파일을 저장한다. lanch 디렉토리에
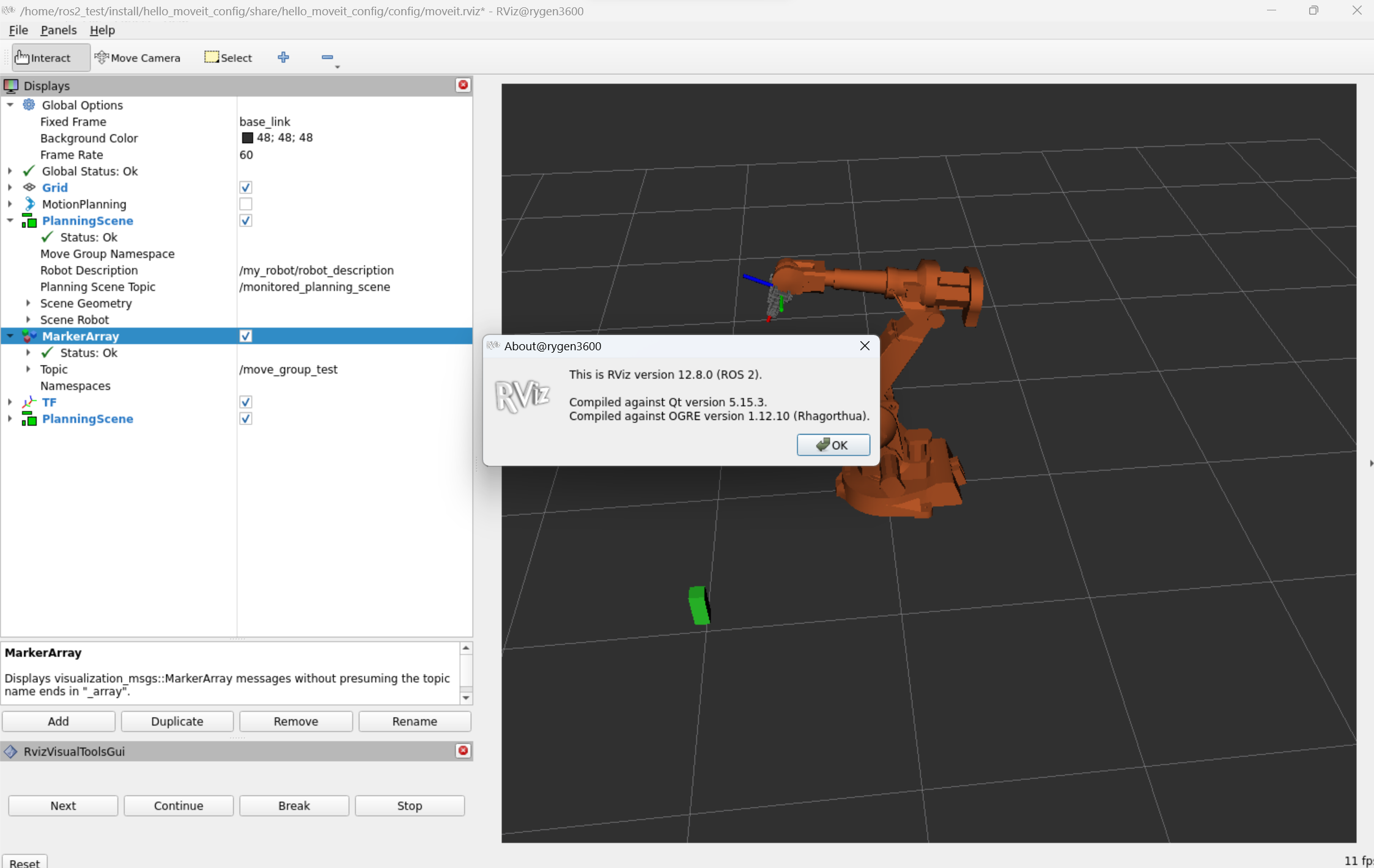
rviz 12.7 update 실패->성공
osrf/ros:humble-desktop 도커 이미지를 설치하면 rviz 12.6가 설치된다. 가끔 node를 만들어 robot_description을 입력하면, rviz2가 제대로 표시 안할 경우가 있다. moveit_setup_assistant도 기존
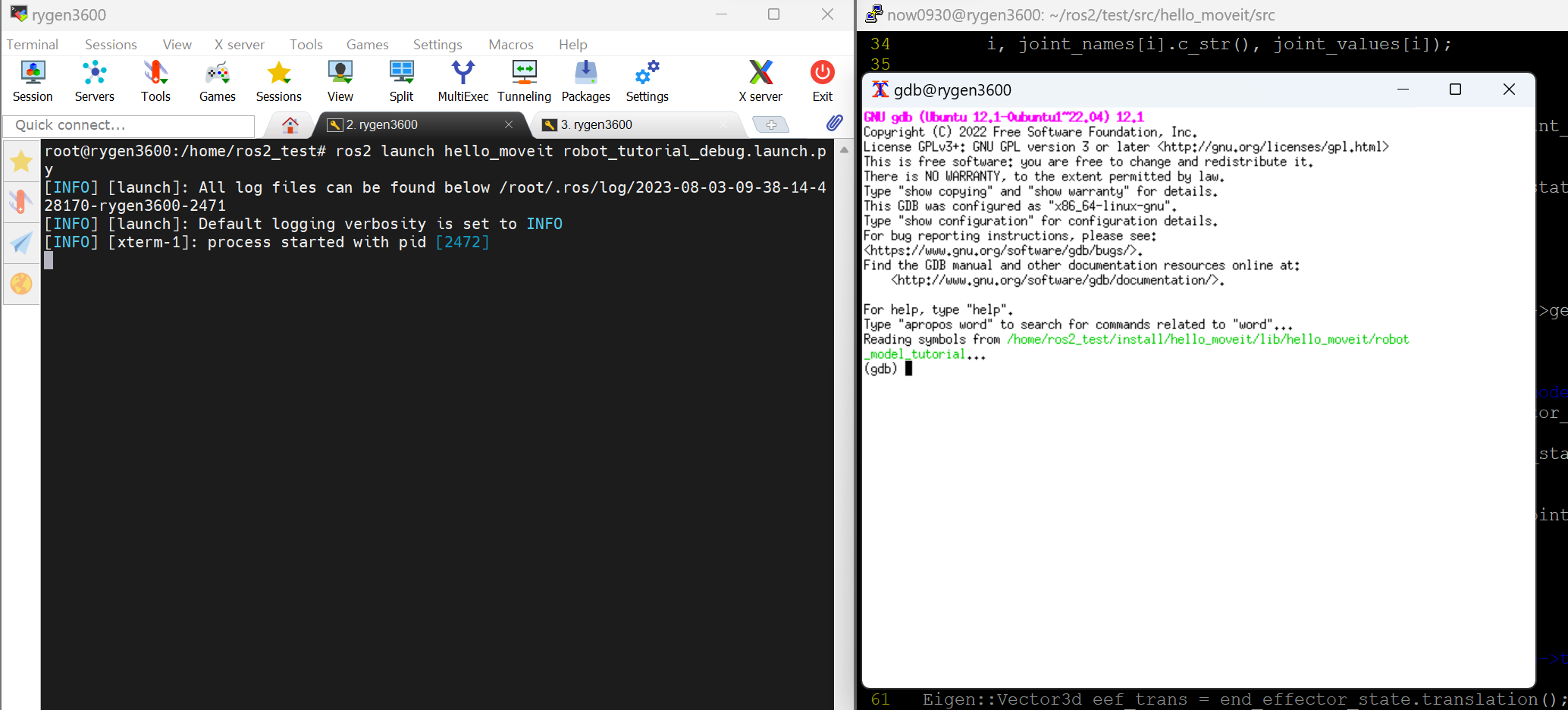
ros2 launch gdb
ros2를 gdb를 사용할 수 있다(대박!). 먼저 ros2 run 옵션으로 사용하는 포스트를 찾았다. 이러면 node를 만들 때 전달한 파라미터를 모두 넣어줘야