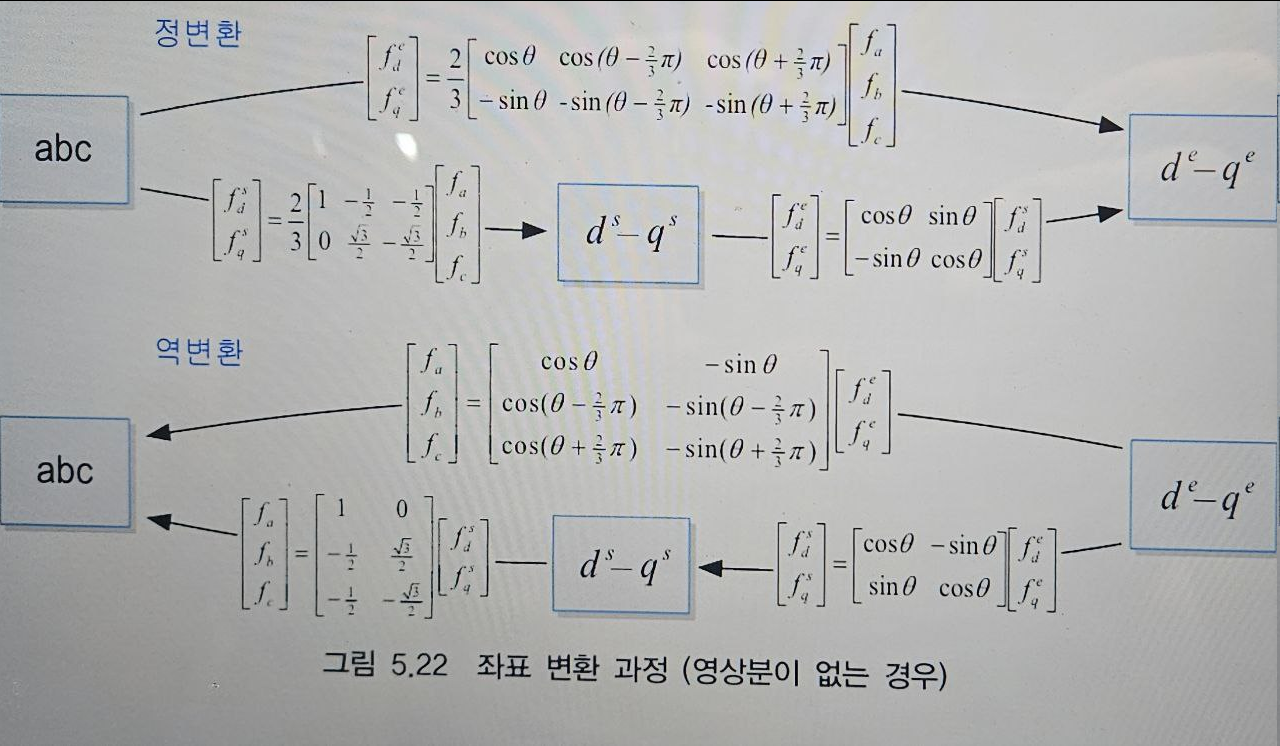
294 페이지 참조
좋은 질문이에요 🙂 이제 그 과정을 아주 정확하게 짚어드릴게요.
1️⃣ 출발점
우리가 알고 있는 관계는: $$[ \frac{dT}{dt},T^{-1} = \omega J ]$$
여기서$$ (T(\theta(t)))는 회전 행렬, (T^{-1}(\theta(t)))는 그 역행렬, (\omega = \frac{d\theta}{dt})$$는 각속도입니다.
2️⃣ 단위행렬의 미분 항등식
항등식: $$[ \frac{d}{dt}\big(T(t)T^{-1}(t)\big) = 0 ]$$
왜냐하면 $$(T(t)T^{-1}(t) = I)$$이므로, 그 미분은 항상 0입니다.
이를 전개하면: $$[ \frac{dT}{dt},T^{-1} + T,\frac{dT^{-1}}{dt} = 0 ]$$
3️⃣ 원하는 형태로 정리
위 식을 정리하면: $$[ T,\frac{dT^{-1}}{dt} = -,\frac{dT}{dt},T^{-1} ]$$
즉, 역행렬의 미분을 왼쪽에 곱한 형태와 원래 미분을 오른쪽에 곱한 형태가 부호만 다르게 연결됩니다.
4️⃣ 주어진 관계 대입
이미 알고 있는 관계: $$[ \frac{dT}{dt},T^{-1} = \omega J ]$$
이를 위 식에 대입하면: $$[ T,\frac{dT^{-1}}{dt} = -,\omega J ]$$
5️⃣ 핵심 포인트
- 교환법칙을 쓴 것이 아니라, 단위행렬의 미분 항등식을 사용한 것.
- 따라서 $$(\frac{dT}{dt}T^{-1} = \omega J)$$에서 곧바로
$$[ T\frac{dT^{-1}}{dt} = -\omega J ]$$로 넘어갈 수 있습니다. - 부호가 달라지는 이유는 바로 이 항등식 때문입니다.
✅ 정리하면:
행렬은 교환법칙이 성립하지 않지만, $$(T T^{-1} = I)$$라는 관계를 미분하면 두 형태가 정확히 연결되고, 그 과정에서 부호가 바뀌는 것이 핵심입니다.
혹시 원하시면, 제가 실제로 $$(T(\theta))$$를 2×2 회전 행렬로 두고 직접 계산해서 이 부호 차이가 어떻게 나타나는지 보여드릴까요?
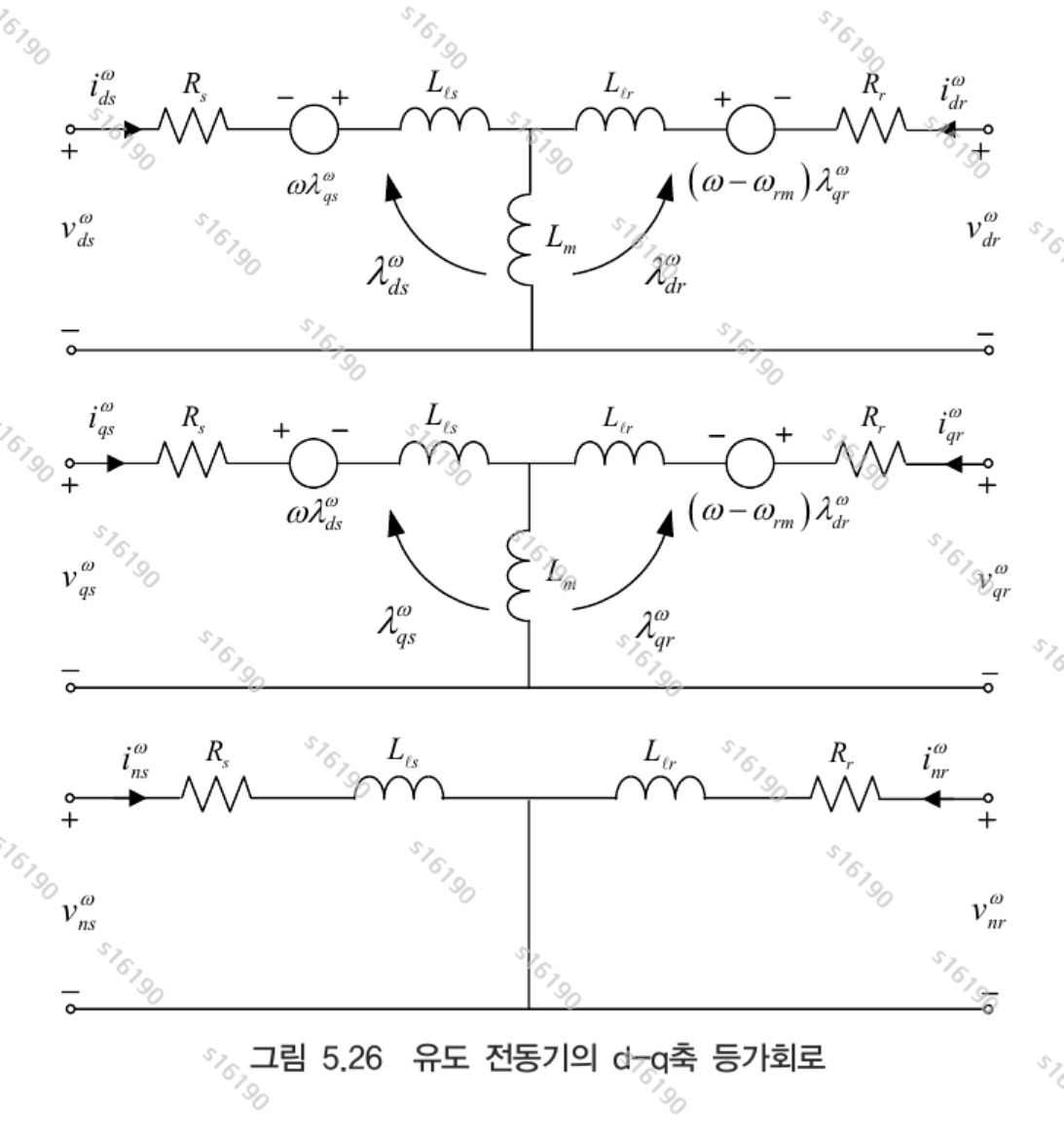
등가 회로
전체 수식
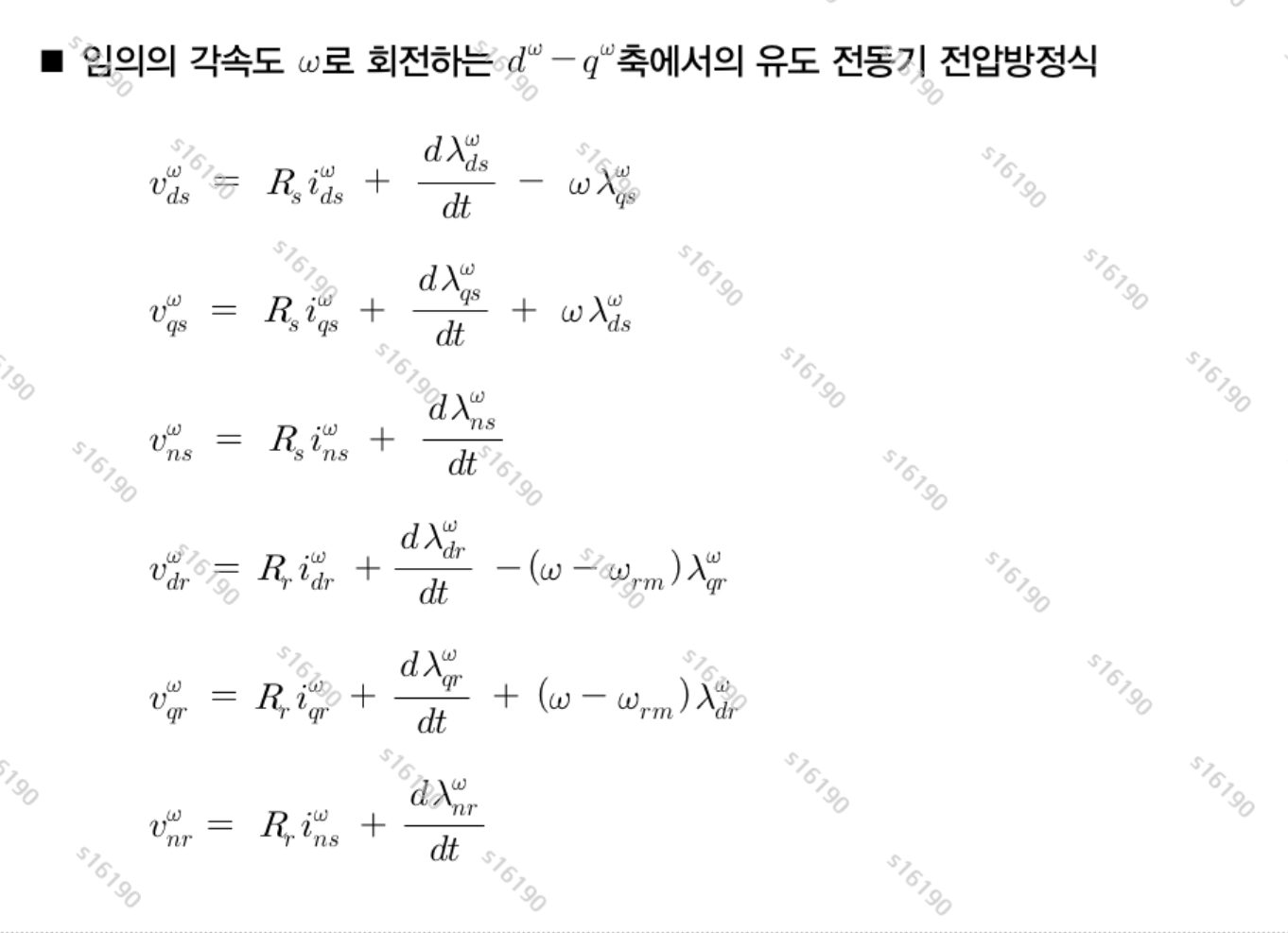

전압 방정식 (회전 좌표계)
토크 방정식 (d–q 좌표계)
단위 해석