gmapping slam으로 지도 만들기
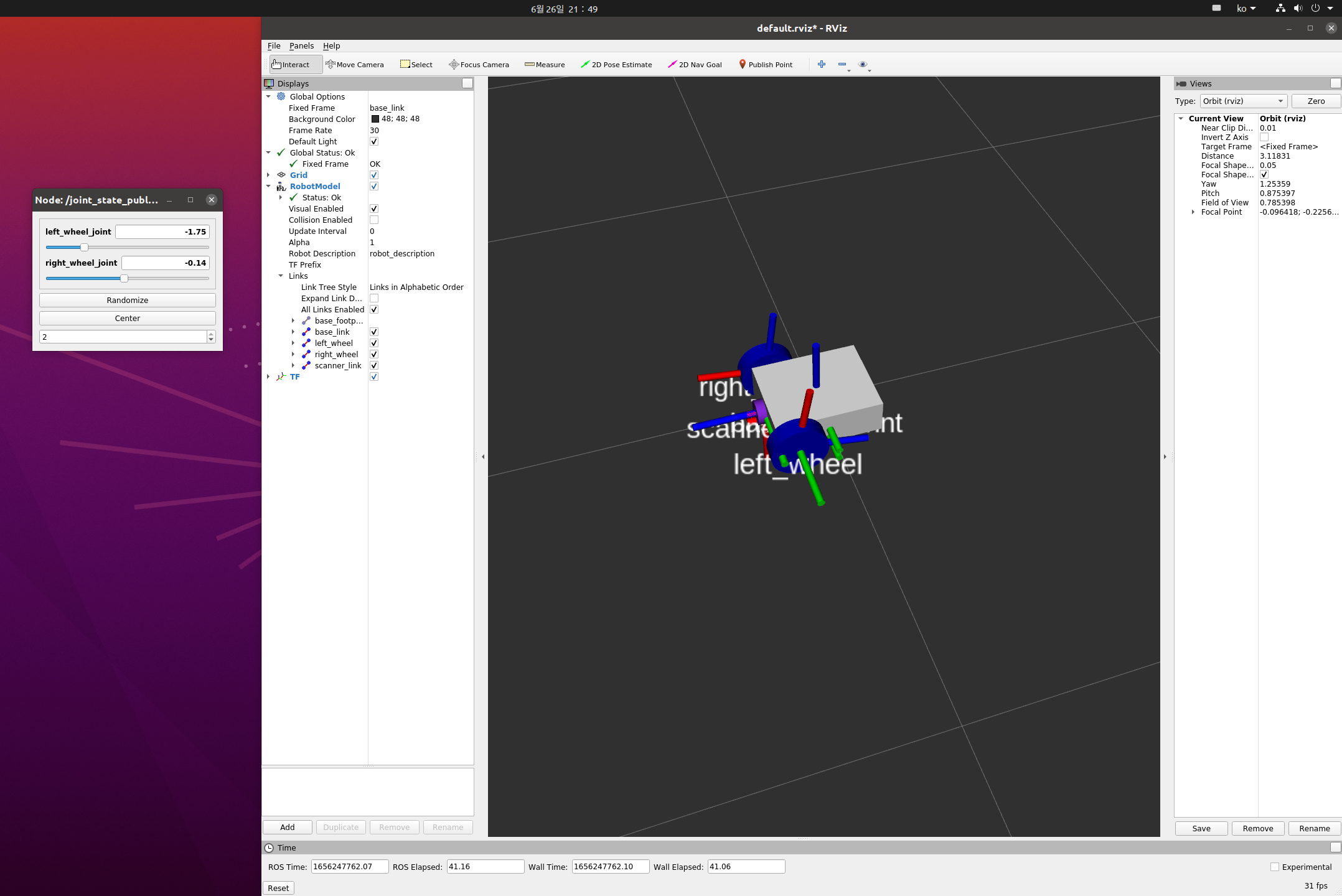
여기 있는 gmapping, slam 튜토리얼을 했다. 튜토리얼은 상당히 쉽게 구성되어 있으나, 내가 실재로 해보면 잘 안된다. 왜 그런지 확인하기 위해 […]
여기 있는 gmapping, slam 튜토리얼을 했다. 튜토리얼은 상당히 쉽게 구성되어 있으나, 내가 실재로 해보면 잘 안된다. 왜 그런지 확인하기 위해 […]
tutorial site를 참조하여 실습을 했다. 로봇 살 돈이 없어 몸으로 때우는 수 밖에. 요즘 원자재와 공급망 이슈로 값도 오르고 구하기도