병렬형(필터형) PID 제어기와 직렬형 PID 제어기를 비교하여 설명하시오.
https://www.controlglobal.com/control/plcs-pacs/article/11291079/variations-in-the-pid-algorithm
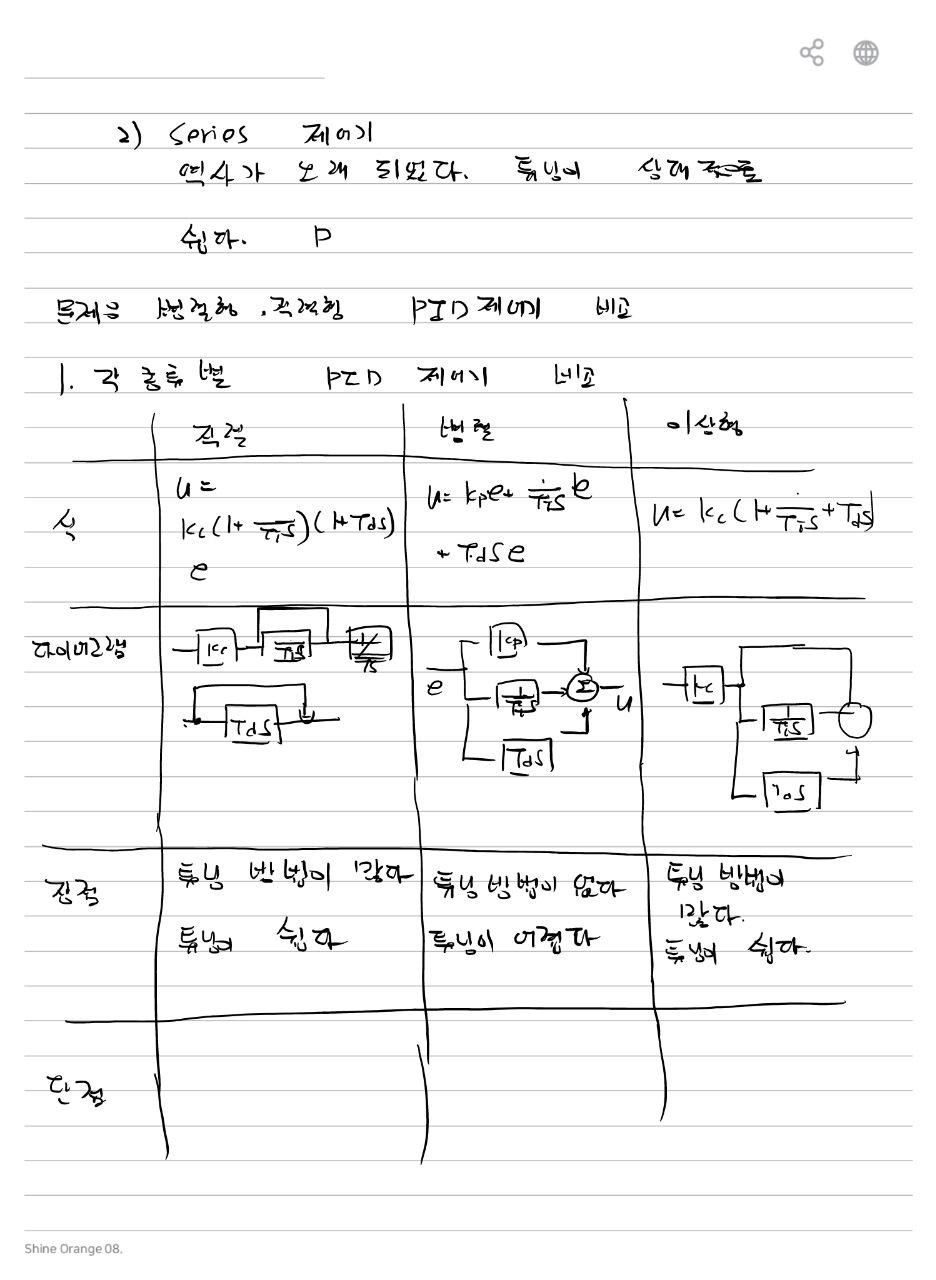
PID 제어기는 비례(Proportional), 적분(Integral), 미분(Derivative) 요소를 조합하여 제어 대상의 오차를 줄이는 방식으로 작동합니다. PID 제어기는 다양한 형태로 구현될 수 있는데, 주로 병렬형(필터형) PID 제어기와 직렬형 PID 제어기로 구분됩니다. 이 두 형태의 PID 제어기는 구조와 특성이 다르며, 각각의 장단점을 가지고 있습니다.
병렬형(필터형) PID 제어기
병렬형 PID 제어기는 비례, 적분, 미분 요소가 병렬로 연결된 형태로 구성됩니다. 각 요소는 독립적으로 작동하며, 각각의 출력을 합하여 최종 제어 신호를 생성합니다.
장점:
- 조정 용이성: 각 요소(P, I, D)를 독립적으로 조정할 수 있어, 제어기의 성능 조정이 비교적 용이합니다.
- 이해와 구현의 용이성: 각 요소가 병렬로 구성되어 있어 구조가 직관적이며 이해하기 쉽고, 구현이 간단합니다.
단점:
- 미분 킥 현상: 시스템에 급격한 입력 변화가 있을 때, 미분 요소가 큰 출력 변화를 일으키는 미분 킥(Derivative Kick) 현상이 발생할 수 있습니다.
직렬형 PID 제어기
직렬형 PID 제어기는 비례 요소와 적분, 미분 요소가 직렬로 연결된 형태로 구성됩니다. 이 형태에서는 미분 요소가 비례 요소를 통과한 신호에 적용되며, 이를 적분 요소로 전달합니다.
장점:
- 미분 킥 현상 감소: 비례 요소를 통과한 후 미분이 적용되기 때문에, 미분 킥 현상이 감소하고 시스템의 안정성이 향상될 수 있습니다.
- 노이즈에 대한 강건성: 미분 요소가 비례 요소의 출력에 적용되므로, 입력 노이즈에 대한 미분 요소의 민감도가 감소합니다.
단점:
- 조정의 복잡성: 요소들이 직렬로 연결되어 있어, 각 요소의 영향이 서로에게 전달됩니다. 이로 인해 PID 파라미터의 조정이 복잡해질 수 있습니다.
- 구현의 복잡성: 병렬형에 비해 구조가 복잡하여 구현이 어려울 수 있습니다.
결론
병렬형 PID 제어기와 직렬형 PID 제어기는 각각의 장단점을 가지고 있으며, 적용하려는 시스템의 특성과 요구 사항에 따라 적절한 형태를 선택해야 합니다. 병렬형은 구현과 조정이 비교적 간단하다는 장점이 있으나, 미분 킥 현상에 주의해야 합니다. 반면, 직렬형은 미분 킥 현상을 줄일 수 있으나, 조정과 구현이 복잡해질 수 있습니다.