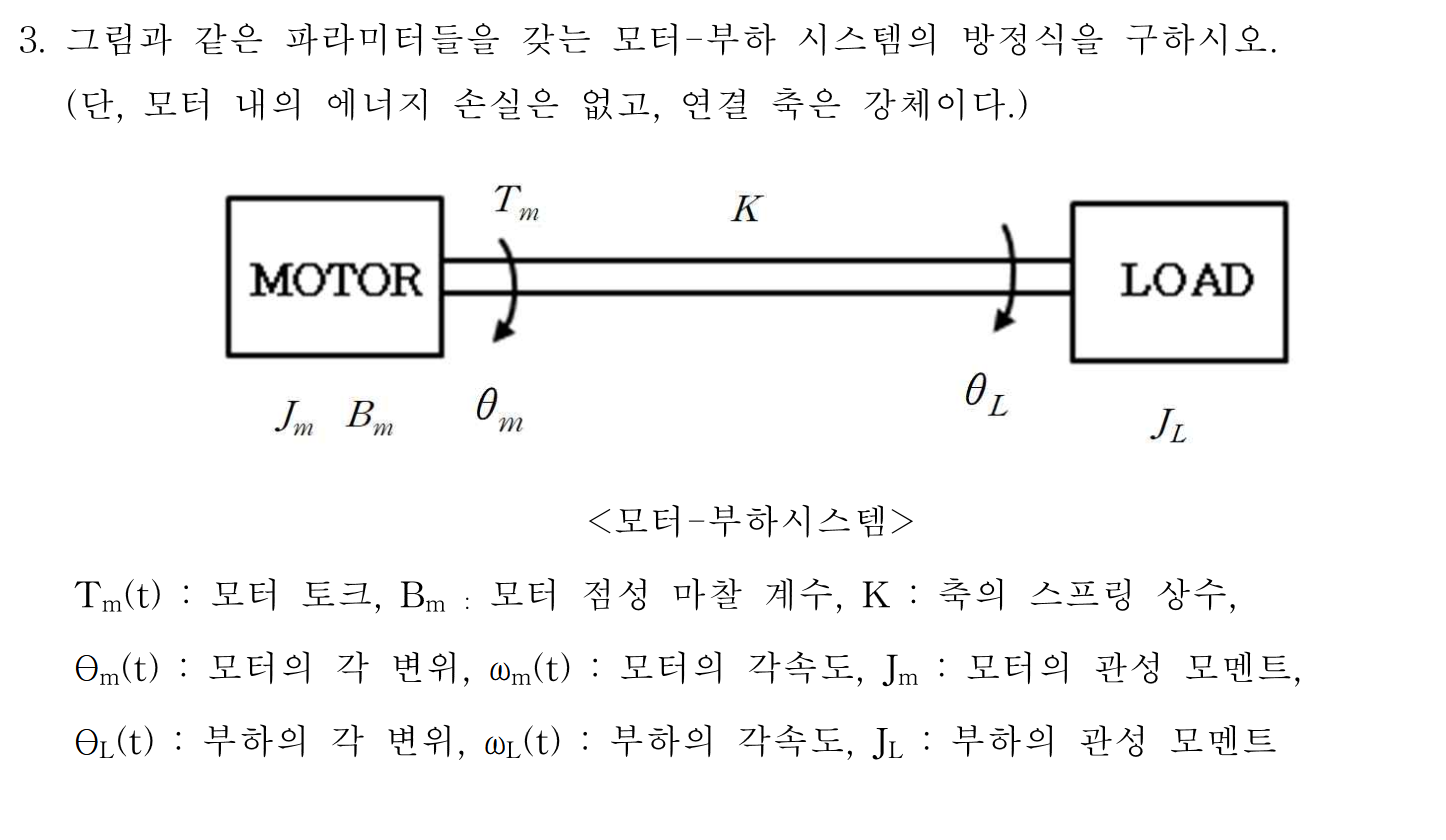
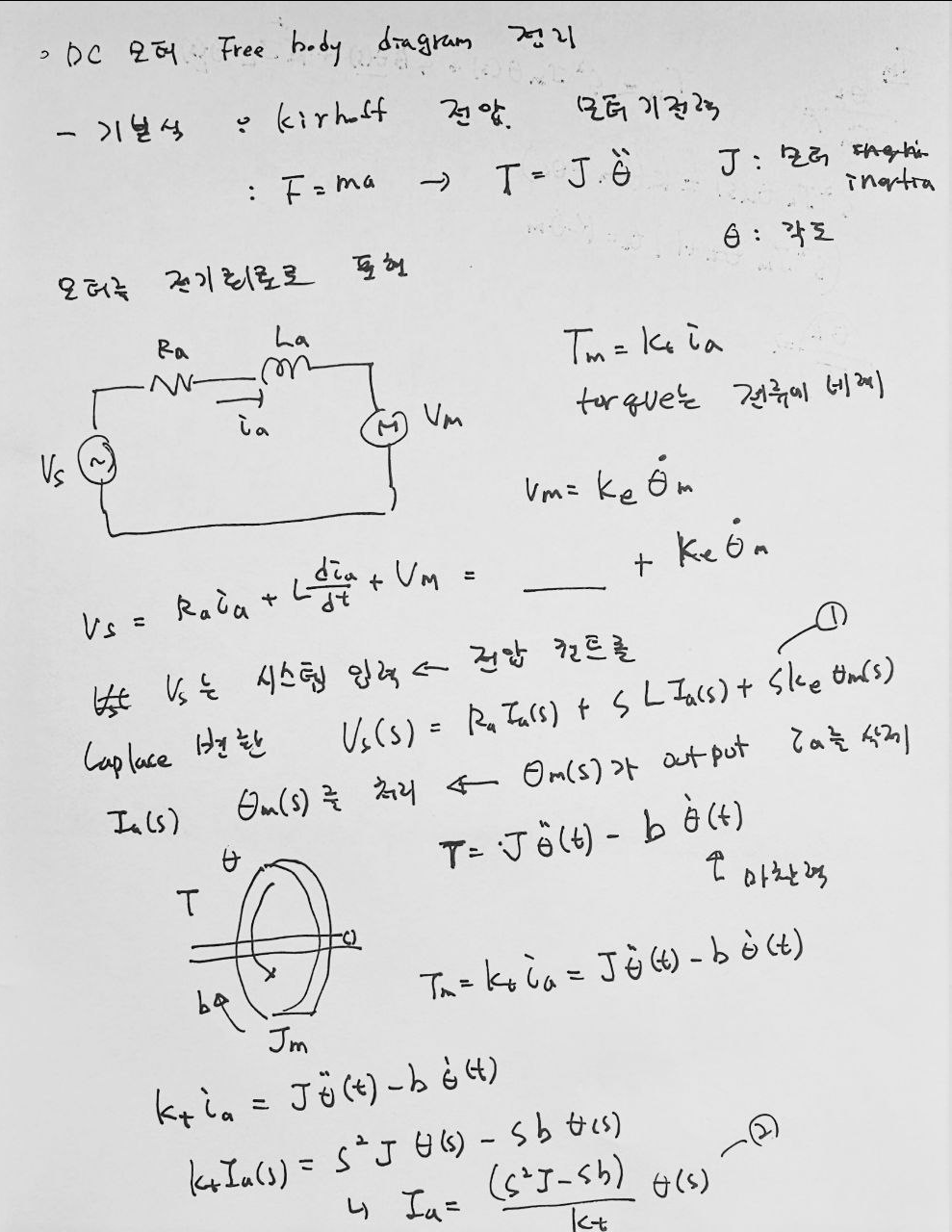
2차 dynamic system을 이해하고 있는지를 물어보는 문제
이 모델은 모터와 부하가 연결된 회전 운동 시스템입니다. 각종 파라미터를 활용하여 시스템의 동작을 표현할 수 있으며, 이를 기반으로 전달함수를 도출할 수 있습니다.
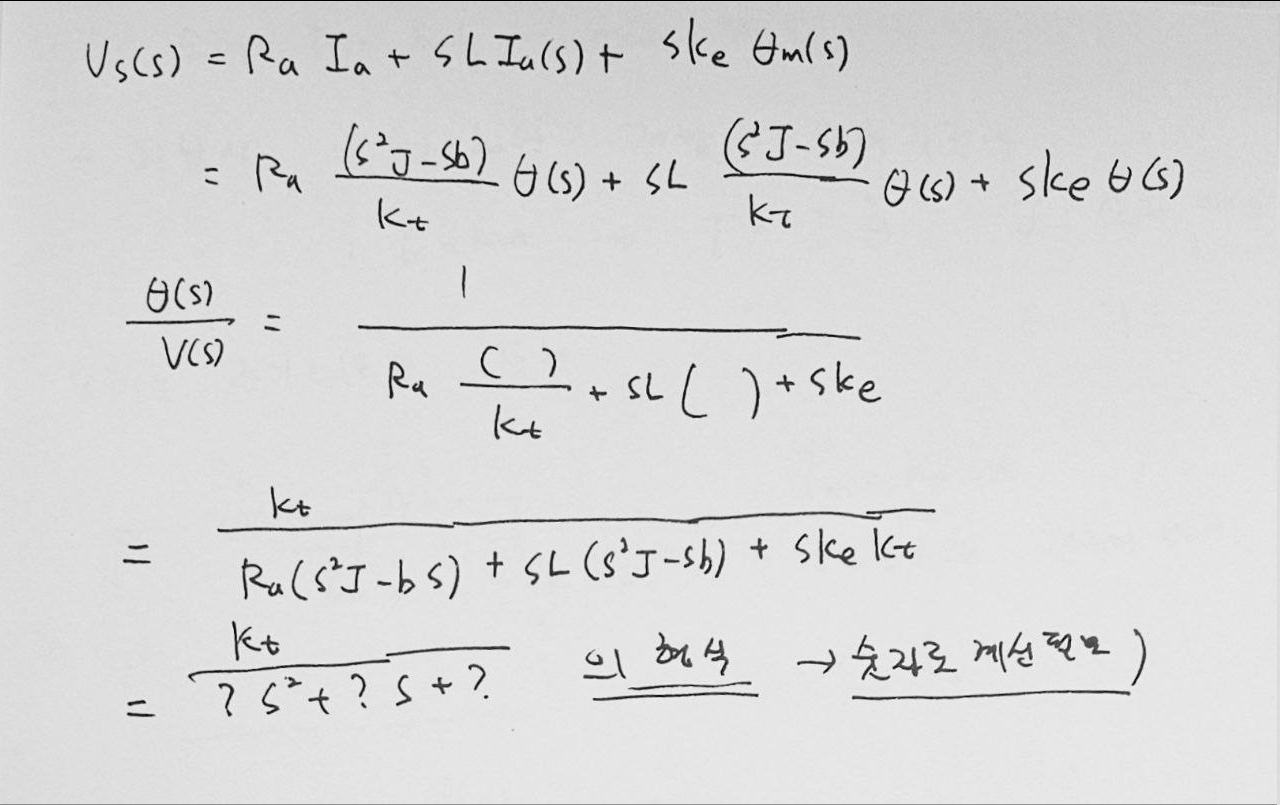
2차 dynamic system을 이해하고 있는지를 물어보는 문제
이 모델은 모터와 부하가 연결된 회전 운동 시스템입니다. 각종 파라미터를 활용하여 시스템의 동작을 표현할 수 있으며, 이를 기반으로 전달함수를 도출할 수 있습니다.