출처를 정확히 특정하기는 어렵지만, 과거 포항공대 이승철 교수 강의에서는 2차 시스템의 거동을 오일러 공식을 활용한 회전 운동의 관점에서 매우 명쾌하게 정리하고 있습니다.
2차 시스템과 오일러 공식의 결합: 운동의 재해석
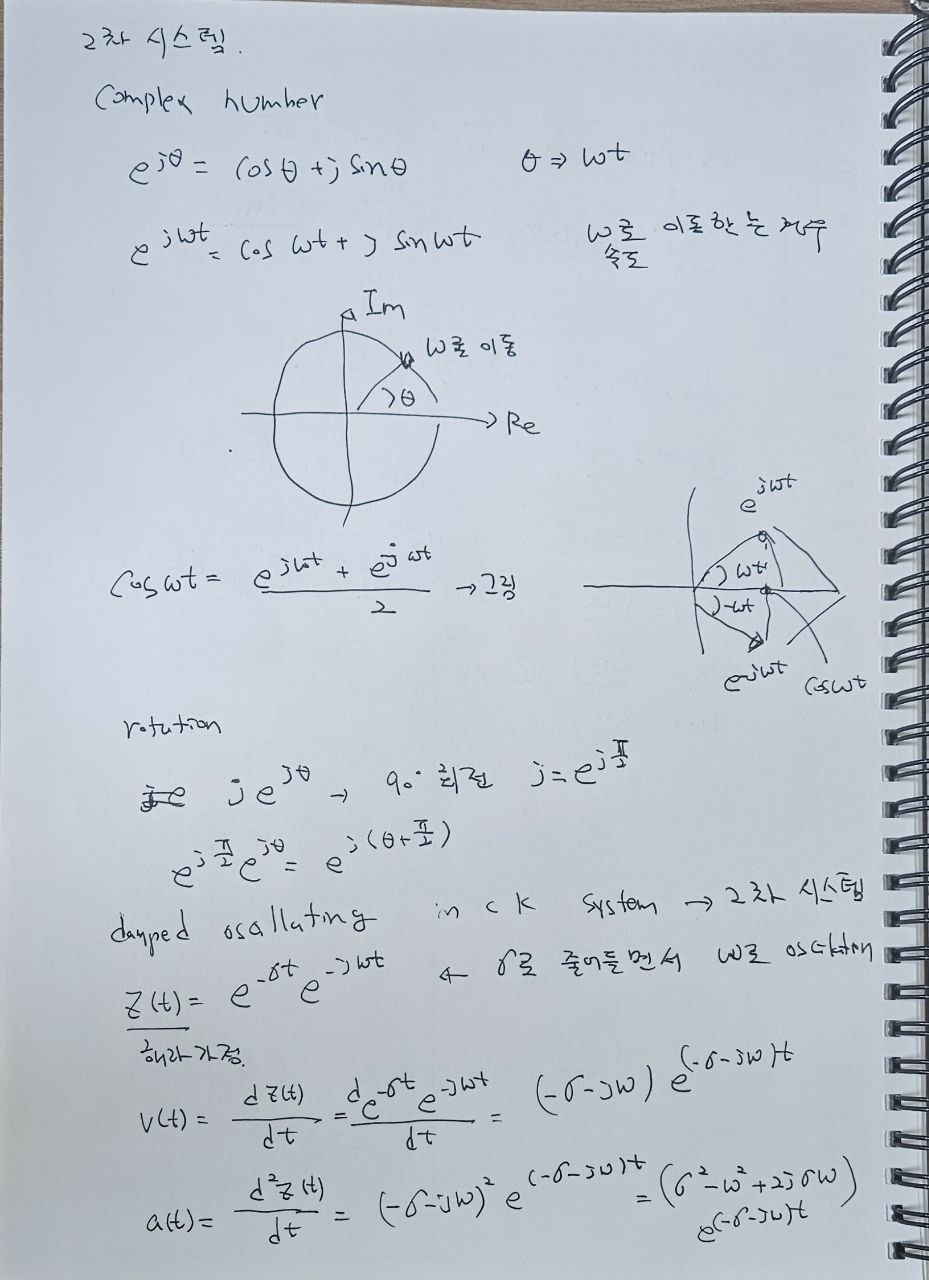
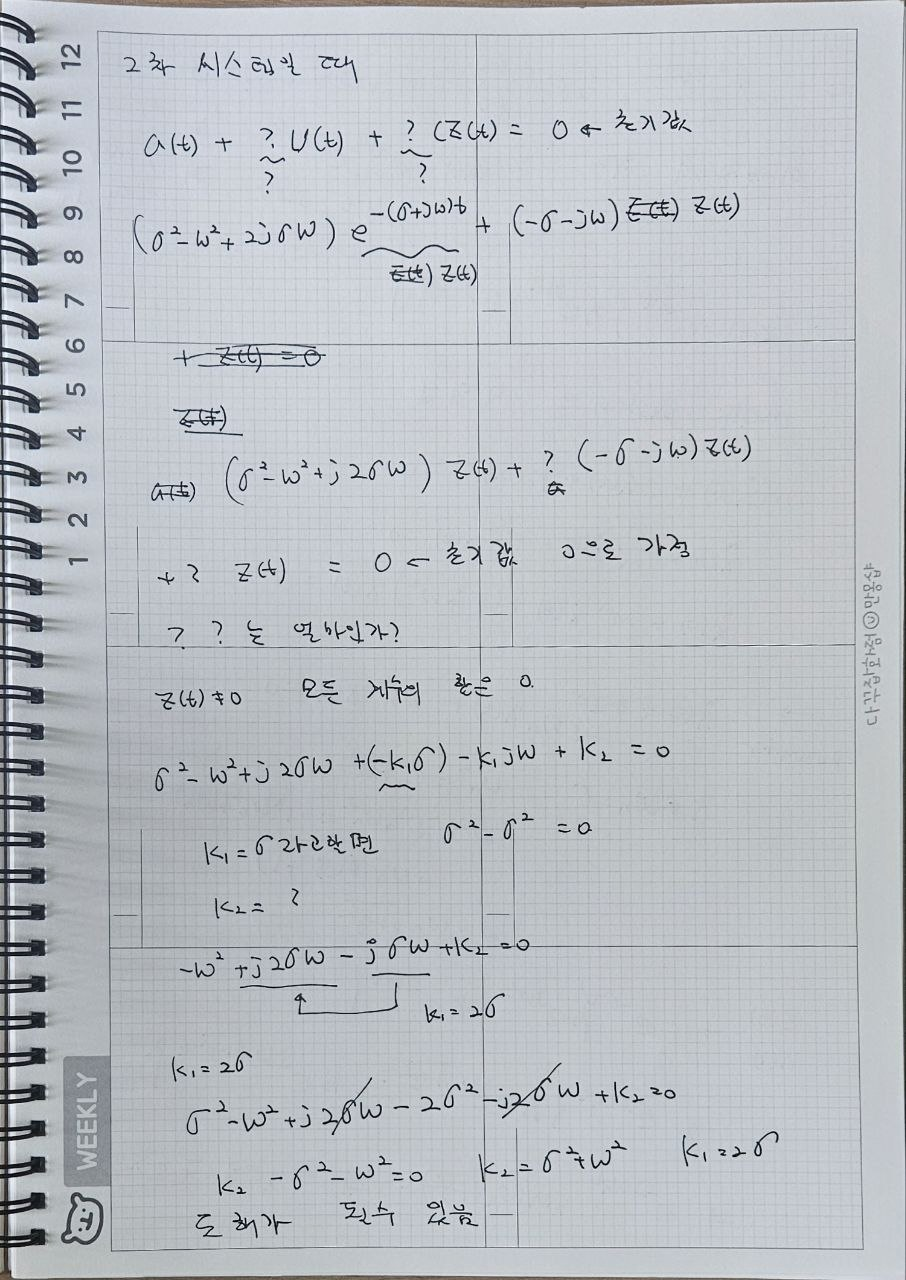
2차 시스템의 특성 방정식(Characteristic Equation)을 풀면 복소근 $$s = \sigma \pm j\omega_d$$가 도출됩니다. 이때 오일러 공식 $$e^{j\theta} = \cos\theta + j\sin\theta$$을 적용하면, 시스템의 응답을 단순한 ‘수치’가 아닌 ‘기하학적 운동’으로 이해할 수 있습니다.
① 복소평면에서의 회전 벡터
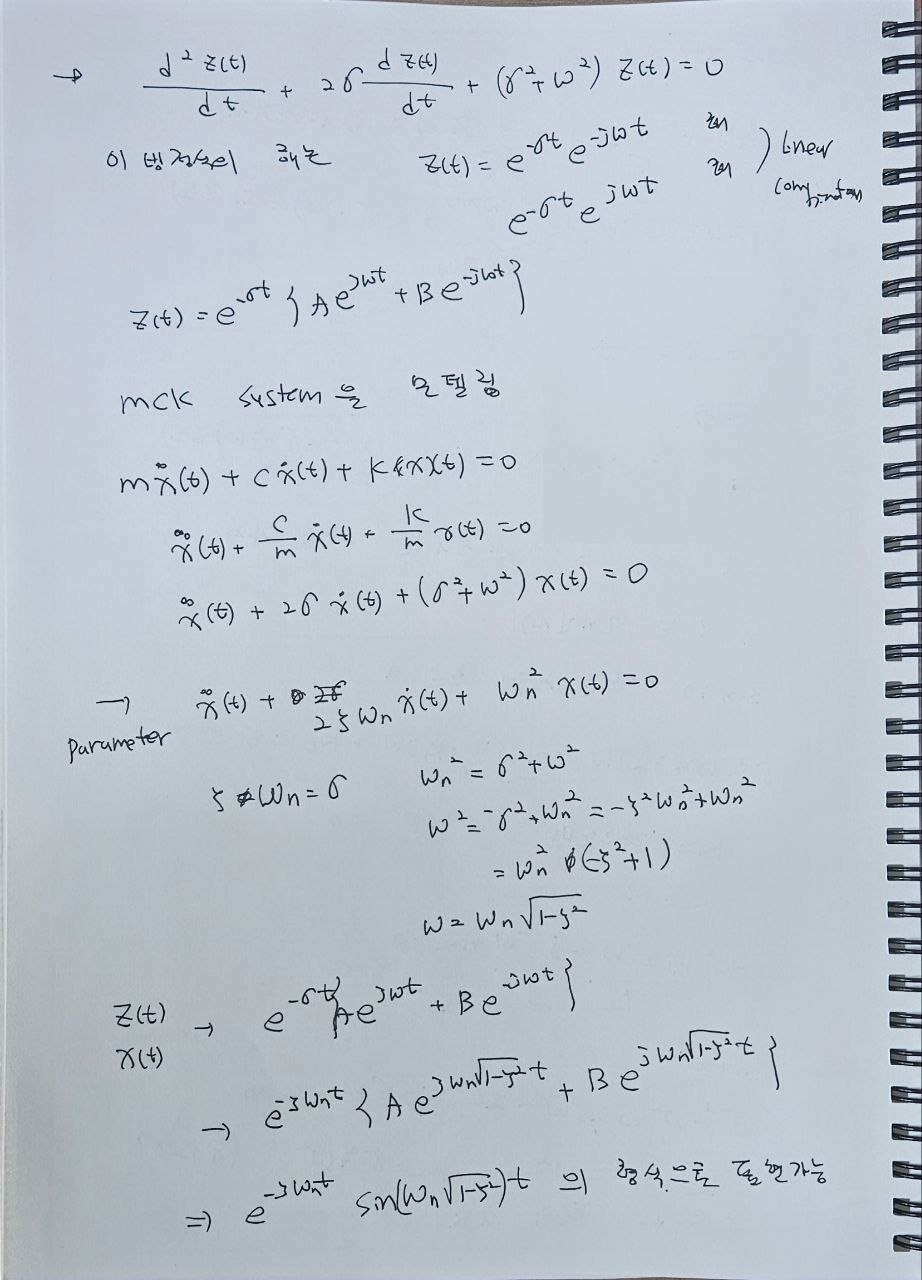
오일러 공식에 의해 $$e^{(\sigma + j\omega_d)t}$$는 다음과 같이 분해됩니다.
- $$e^{\sigma t}$$(감쇠 성분): 시간에 따라 진폭이 줄어드는 정도를 결정합니다. (실수부)
- $$e^{j\omega_d t}$$ (회전 성분): 복소평면상에서 일정한 속도로 회전하는 운동을 의미합니다. (허수부)
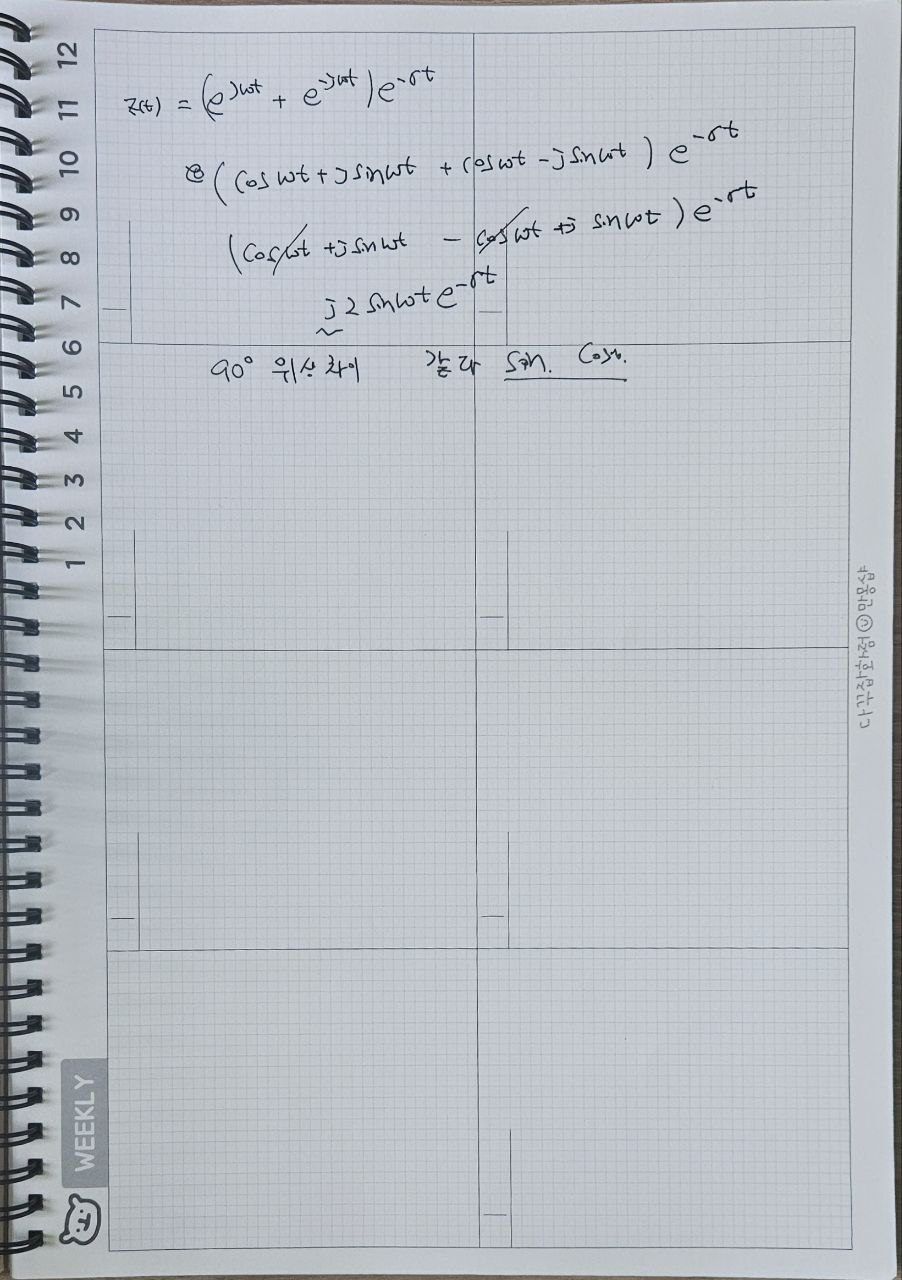
② 진동을 ‘회전의 투영’으로 이해
2차 시스템에서 나타나는 **사인파 형태의 진동(Oscillation)**은 사실 복소평면에서 회전하고 있는 벡터를 실축(Real axis) 위로 **투영(Projection)**한 결과입니다.
③ 제동비($$\zeta$$)에 따른 운동의 변화
오일러 공식의 관점에서 보면 시스템의 안정성과 응답 속도는 복소평면상 근의 위치에 따라 결정됩니다.
- 비제동 (Undamped): 실수부가 0이 되어 허수축 위에서 순수한 원운동을 하며, 끝없이 진동합니다.
- 미달 제동 (Underdamped): 실수부가 음수이므로, 회전하면서 중심(원점)으로 수렴하는 나선형(Spiral) 운동을 보입니다.
3. 결론: 이 관점의 ‘대박’ 포인트
보통 2차 시스템을 단순히 미분방정식의 해로만 접근하면 수식 계산에 매몰되기 쉽습니다. 하지만 포항공대 강의 방식처럼 오일러 공식을 통해 복소평면상의 회전 운동으로 해석하면 다음과 같은 통찰을 얻을 수 있습니다.
“2차 시스템의 응답은 복소평면 위에서 나선형으로 수렴하는 벡터의 그림자를 보는 것과 같다.”
이러한 기하학적 접근은 향후 제어 공학에서 주파수 응답이나 복소 평면상의 근궤적(Root Locus)을 이해할 때 매우 강력한 직관력을 제공합니다.