ros2 launch gdb
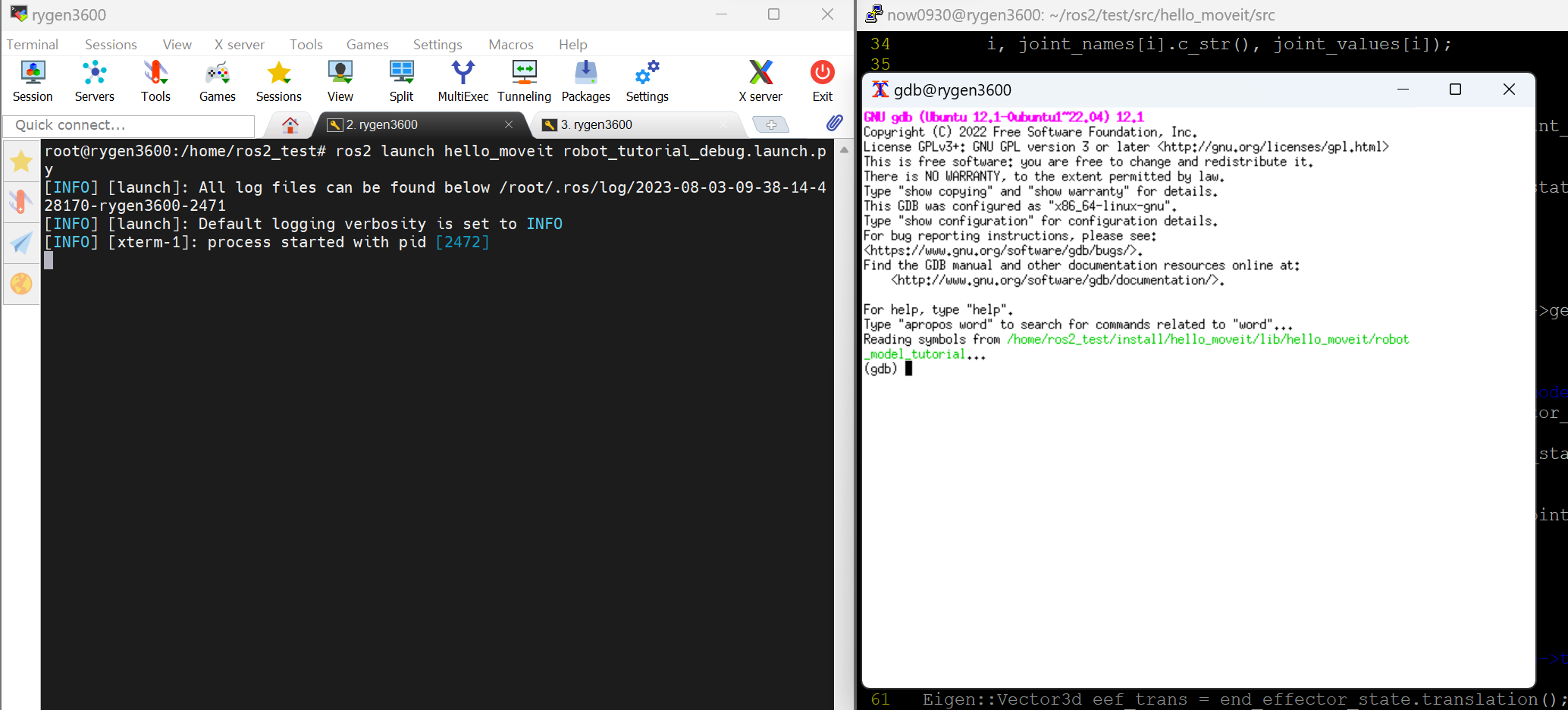
ros2를 gdb를 사용할 수 있다(대박!). 먼저 ros2 run 옵션으로 사용하는 포스트를 찾았다. 이러면 node를 만들 때 전달한 파라미터를 모두 넣어줘야 […]
ros2를 gdb를 사용할 수 있다(대박!). 먼저 ros2 run 옵션으로 사용하는 포스트를 찾았다. 이러면 node를 만들 때 전달한 파라미터를 모두 넣어줘야 […]
pipe를 이해하기 전, 일단 gdb를 사용하는 방법을 알아야 했다. pipe가 서로 다른 프로세스를 연결하는 수단이라, gdb 기본 설정으로는 pipe로 어떤